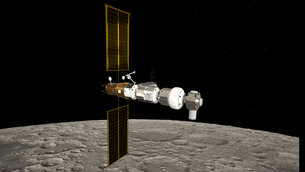
Gateway and Moon
This Autumn is seeing a number of experiments controlling robots from afar, with ESA astronaut Luca Parmitano directing a robot in The Netherlands and engineers in Germany controlling a rover in Canada. Imagine looking down at the Moon from the Gateway as you prepare to land near a lunar base to run experiments, but you know the base needs maintenance work on the life-support system that will take days. It would be better to maintain the base from orbit so the astronauts can get straight to work once on the Moon. Human-robotic partnerships are at the heart of ESA's exploration strategy, which includes preparing for scenarios like this by sending robotic scouts to the Moon and planets, hand-in-hand with astronauts controlling them from orbit. The Meteron project was formed to develop the technology and know-how needed to operate rovers in these harsh conditions. It covers all aspects of operations, from communications and the user interface to surface operations and even connecting the robots to the astronauts by sense of touch. Historic robotic control.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.