
The newly developed robotic leg is inspired by living creatures and jumps over different terrains much more manoeuvrable and energy-efficiently than previous robots

Inventors and researchers have been developing robots for almost 70 years. To date, all the machines they have built - whether for factories or elsewhere - have had one thing in common: they are powered by motors, a technology that is already 200 years old. Even walking robots feature arms and legs that are powered by motors, not by muscles as in humans and animals. This in part suggests why they lack the mobility and adaptability of living creatures.
A new muscle-powered robotic leg is not only more energy efficient than a conventional one, it can also perform high jumps and fast movements as well as detect and react to obstacles - all without the need for complex sensors. The new leg has been developed by researchers at the Max Planck Institute for Intelligent Systems (MPI-IS) and ETH Zurich in a research partnership called Max Planck ETH Center for Learning Systems, known as CLS.
Electrically charged like a balloon
As in humans and animals, an extensor and a flexor muscle ensure that the robotic leg can move in both directions. These electro-hydraulic actuators, which the researchers call HASELs , are attached to the skeleton by tendons.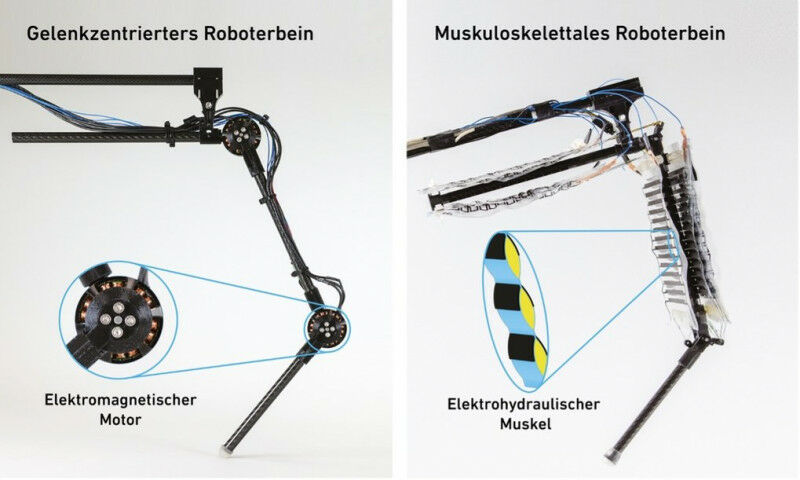
Pairs of these actuators attached to a skeleton result in the same paired muscle movements as in living creatures: as one muscle shortens, its counterpart lengthens. The researchers use a computer code that communicates with high-voltage amplifiers to control which actuators contract, and which extend.
More efficient than electric motors
The researchers compared the energy efficiency of their robotic leg with that of a conventional robotic leg powered by an electric motor. Among other things, they analysed how much energy is unnecessarily converted into heat. -On the infrared image, it’s easy to see that the motorised leg consumes much more energy if, say, it has to hold a bent position,- Buchner says. The temperature in the electro-hydraulic leg, in contrast, remains the same. This is because the artificial muscle is electrostatic. -It’s like the example with the balloon and the hair, where the hair stays stuck to the balloon for quite a long time,- Buchner adds. -Typically, electric motor driven robots need heat management which requires additional heat sinks or fans for diffusing the heat to the air. Our system doesn’t require them,- Fukushima says.Agile movement over uneven terrain
The robotic leg-s ability to jump is based on its ability to lift its own weight explosively. The researchers also showed that the robotic leg has a high degree of adaptability, which is particularly important for soft robotics. Only if the musculoskeletal system has sufficient elasticity can it adapt flexibly to the terrain in question. -It’s no different with living creatures. If we can’t bend our knees, for example, walking on an uneven surface becomes much more difficult,- says Robert Katzschmann from ETH Zürich, who is heading the team together with Christoph Keplinger from the Max Planck Institute for Intelligent Systems. -Just think of taking a step down from the pavement onto the road.-In contrast to electric motors requiring sensors to constantly tell what angle the robotic leg is at, the artificial muscle adapts to suitable position through the interaction with the environment. This is driven just by two input signals: one to bend the joint and one to extend it. Fukushima explains: -Adapting to the terrain is a key aspect. When a person lands after jumping into the air, they don’t have to think in advance about whether they should bend their knees at a 90-degree or a 70-degree angle.- The same principle applies to the robotic leg-s musculoskeletal system: upon landing, the leg joint adaptively moves into a suitable angle depending on whether the surface is hard or soft.
Emerging technology opens up new possibilities
Scientists at the Max Planck Institute for Intelligent Systems together with a team at ETH Zurich developed a robotic leg powered by electro-hydraulic artificial muscles known as HASELS. Inspired by living creatures, the leg jumps across different terrains such as grass, pebbles - even rocks - in an agile and energy-efficient manner.
Robert Katzschmann does have one reservation: -Compared to walking robots with electric motors, our system is still limited. The leg is currently attached to a rod, jumps in circles and can’t yet move freely.- Future work should overcome these limitations, opening the door to developing real walking robots with artificial muscles. He further elaborates: -If we combine the robotic leg in a quadruped robot or a humanoid robot with two legs, maybe one day, when it is battery-powered, we can deploy it as a rescue robot.-
LB (MPI-IS)
Weitere Informationen
The Max Planck ETH Center for Learning Systems (CLS) is a partnership between the Max Planck Institute for Intelligent Systems (MPI-IS) in Germany, and the engineering departments at ETH Zurich, Switzerland. CLS addresses interdisciplinary research questions in the design and analysis of natural and man-made learning systems. The study above is an ideal example of a collaborative research project on physical intelligence under the CLS umbrella.
Many people use navigation aids, but our brains navigate surprisingly well even without technology. This issue sheds light on how we find our way around unknown environments better than machines, how robots learn to cope with new tasks and unfamiliar terrain and how we humans can orientate ourselves in the mass of information on the internet and expose false information.
A swimming device just a few millimetres long uses a magnetic drive to propel movement modelled on baby jellyfish