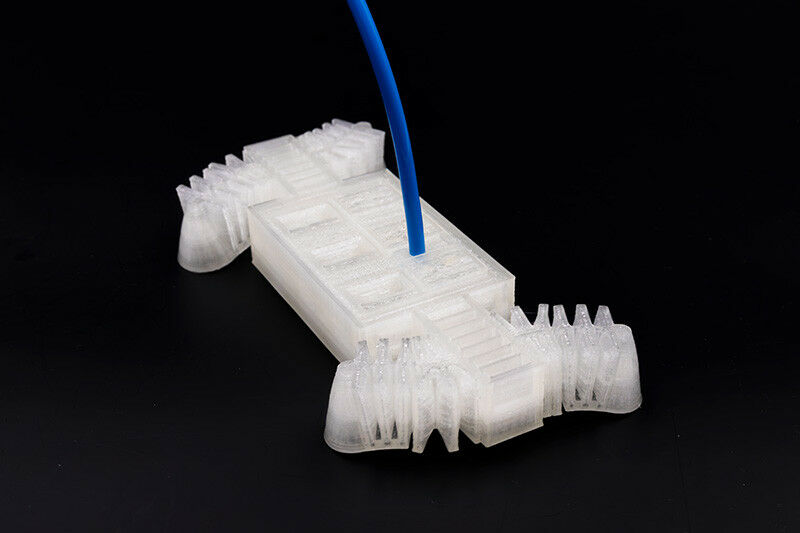
The modules make it possible for the first time to produce flexible and electronics-free soft robots entirely in a 3D printer using filament made from conventional printing material. Photo: Lucia Brunold
The modules make it possible for the first time to produce flexible and electronics-free soft robots entirely in a 3D printer using filament made from conventional printing material. Photo: Lucia Brunold - Research team at the University of Freiburg develops 3D-printed pneumatic logic modules that control the movements of soft robots using only air pressure In the future, soft robots will be able to perform tasks that cannot be done by conventional robots. These soft robots could be used in terrain that is difficult to access and in environments where they are exposed to chemicals or radiation that would harm electronically controlled robots made of metal. This requires such soft robots to be controllable without any electronics, which is still a challenge in development. A research team at the University of Freiburg has now developed 3D-printed pneumatic logic modules that control the movements of soft robots using air pressure alone. These modules enable logical switching of the air flow and can thus imitate electrical control. The modules make it possible for the first time to produce flexible and electronics-free soft robots entirely in a 3D printer using conventional filament printing material.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.