 Katherine J. Kuchenbecker training the robot ’Baxter’. In her research, Kuchenbecker wants to endow machines with a sense of touch.
Katherine J. Kuchenbecker training the robot ’Baxter’. In her research, Kuchenbecker wants to endow machines with a sense of touch.
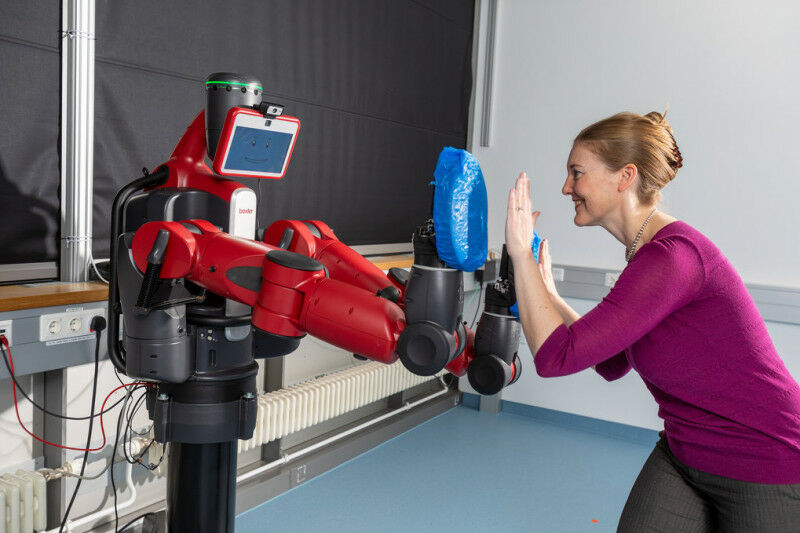
Katherine J. Kuchenbecker training the robot 'Baxter'. In her research, Kuchenbecker wants to endow machines with a sense of touch. Axel Griesch - In order to support people in therapy or in everyday life in the future, machines will have to be capable of feeling and gently touching their human counterparts. Katherine J. Kuchenbecker and her team at the Max Planck Institute for Intelligent Systems in Stuttgart are currently developing the technology required for this objective and are already testing sensitive robots for initial applications. Text: Andreas Knebl Warm, secure, safe. That's how a hug should feel. And that's how it actually feels when HuggieBot's strong arms close around you and you-re pressed against its warm, broad chest.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.
Your Benefits
- Access to all content
- Receive newsmails for news and jobs
- Post ads




