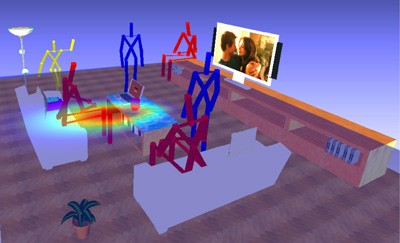
A robot populates a room with imaginary human stick figures in order to decide where objects should go to suit the needs of humans.
If you hire a robot to help you move into your new apartment, you won't have to send out for pizza. But you will have to give the robot a system for figuring out where things go. The best approach, according to Cornell researchers, is to ask "How will humans use this?" Researchers in the Personal Robotics Lab of Ashutosh Saxena, assistant professor of computer science, have already taught robots to identify common objects, pick them up and place them stably in appropriate locations. Now they've added the human element by teaching robots to "hallucinate" where and how humans might stand, sit or work in a room, and place objects in their usual relationship to those imaginary people. Their work will be reported at the International Symposium on Experimental Robotics, June 21 in Quebec, and the International Conference of Machine Learning, June 29 in Edinburgh, Scotland. Previous work on robotic placement, the researchers note, has relied on modeling relationships between objects. A keyboard goes in front of a monitor, and a mouse goes next to the keyboard.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.