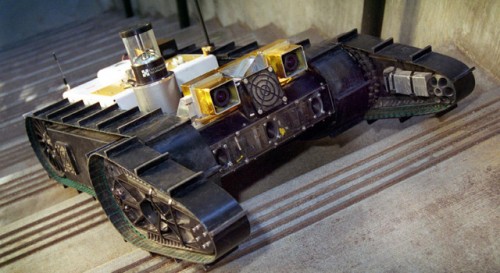
This image shows Urbie, one of PackBot’s "ancestors." This lightweight structure, which included some NASA technology, had rugged features that were useful in emergency response situations. age credit: NASA/JPL-Caltech
Design techniques honed at NASA's Jet Propulsion Laboratory in Pasadena, Calif., for Mars rovers were used to create the rover currently examining the inside of Japan's nuclear reactors, in areas not yet deemed safe for human crews. The iRobot PackBot employs technologies used previously in the design of "Rocky-7," which served as a terrestrial test bed at JPL for the current twin Mars rovers, Spirit and Opportunity. PackBot's structural features are modeled after Rocky-7, including the lightweight, high-torque actuators that control the rover; and its strong, lightweight frame structure and sheet-metal chassis. PackBot's other "ancestor," called Urbie, was an urban reconnaissance robot with military and disaster response applications. Urbie's lightweight structure and rugged features also made it useful in emergency response situations; for example, at sites contaminated with radiation and chemical spills, and at buildings damaged by earthquakes. Urbie's physical structure was designed by iRobot Corp.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.