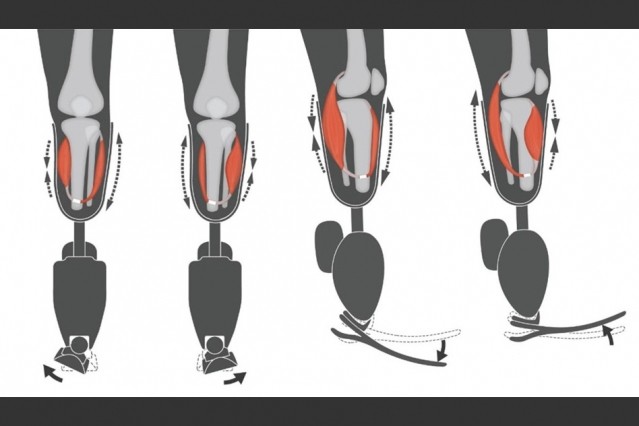
Two agonist-antagonist myoneural interface devices (AMIs) were surgically created in the patient’s residual limb: One was electrically linked to the robotic ankle joint, and the other to the robotic subtalar joint.
Humans can accurately sense the position, speed, and torque of their limbs, even with their eyes shut. This sense, known as proprioception, allows humans to precisely control their body movements. Despite significant improvements to prosthetic devices in recent years, researchers have been unable to provide this essential sensation to people with artificial limbs, limiting their ability to accurately control their movements. Researchers at the Center for Extreme Bionics at the MIT Media Lab have invented a new neural interface and communication paradigm that is able to send movement commands from the central nervous system to a robotic prosthesis, and relay proprioceptive feedback describing movement of the joint back to the central nervous system in return. This new paradigm, known as the agonist-antagonist myoneural interface, involves a novel surgical approach to limb amputation in which dynamic muscle relationships are preserved within the amputated limb. The AMI was validated in extensive preclinical experimentation at MIT prior to its first surgical implementation in a human patient at Brigham and Women's Faulkner Hospital. In a paper published today in Science Translational Medicine , the researchers describe the first human implementation of the agonist-antagonist myoneural interface (AMI), in a person with below-knee amputation.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.